Подробности Категория: Подвижной состав
Тяговые характеристики электроподвижного состава Характеристики тяговых электродвигателей постоянного тока электроподвижного состава На электровозах и электропоездах постоянного и переменно-постоянного тока применяют тяговые электродвигатели постоянного тока.
Форма тяговых характеристик электроподвижного состава (э.п.с.), в основном, определяется электромеханическими характеристиками тяговых электродвигателей (ТЭД), приведенных к валу двигателя, а именно: nд =f(Iд) — частоты вращения якоря ТЭД от его тока при заданном напряжении питания от контактной сети UKC; Мд =f(I ) — вращающего момента на якоре ТЭД от тока; ηд = f(Iд) — к.
п.д. тягового электродвигателя от тока якоря. Электромеханические характеристики тяговых электродвигателей э.п.с. получают при стендовых испытаниях на заводе-изготовителе.
При тяговых расчетах электромеханические характеристики тягового электродвигателя обычно приводят к ободу колес колесной пары электровозов и электропоездов и получают электромеханические характеристики колесно-моторного блока [5]:
V=f(Iд) — скорости движения колесной пары э.п.с. от тока якоря ТЭД;
F = f(Iд) — касательной силы тяги колесной пары э.п.с. от тока якоря ТЭД; ηэ=f(Iд)- К.П.Д. колесно-моторного блока э.п.с. от тока якоря ТЭД. При пересчете электромеханических характеристик тяговых электродвигателей на характеристики колесно-моторных блоков используют следующие формулы:
- скорость движения колесной пары э.п.с., км/ч:

 где С8 — конструктивная постоянная тягового электродвигателя; μ — передаточное число тяговых редукторов колесной пары; DK — диаметр колес колесной пары, м;
где С8 — конструктивная постоянная тягового электродвигателя; μ — передаточное число тяговых редукторов колесной пары; DK — диаметр колес колесной пары, м;
- касательная сила тяги на ободе колес колесной пары, Н:

 где ΔΡΜaгн — потери мощности в магнитной системе ТЭД, кВт; ∆Рмех — механические потери мощности в якорных подшипниках и щеточном аппарате ТЭД, кВт; ∆Р — потери мощности в тяговых редукторах колесной пары и моторно-осевых подшипниках ТЭД, кВт; V — скорость движения, км/ч;
где ΔΡΜaгн — потери мощности в магнитной системе ТЭД, кВт; ∆Рмех — механические потери мощности в якорных подшипниках и щеточном аппарате ТЭД, кВт; ∆Р — потери мощности в тяговых редукторах колесной пары и моторно-осевых подшипниках ТЭД, кВт; V — скорость движения, км/ч;
- коэффициент полезного действия колесно-моторного блока э.п.с.

 Рис. 37. Схемы систем возбуждения тяговых электродвигателей электроподвижного состава: а — последовательного; б — параллельного; в — смешанного при согласном включении обмоток; г — смешанного при встречном включении обмоток; д — независимого возбуждения
Рис. 37. Схемы систем возбуждения тяговых электродвигателей электроподвижного состава: а — последовательного; б — параллельного; в — смешанного при согласном включении обмоток; г — смешанного при встречном включении обмоток; д — независимого возбуждения 
На электровозах переменно-постоянного тока и э.п.с. постоянного тока с импульсным регулированием предпочтительнее оказалось использование тяговых двигателей с независимым возбуждением и жесткими характеристиками.
Такие характеристики тяговых электродвигателей позволяют уменьшить интенсивность процессов боксования локомотива и, соответственно, увеличить критические веса водимых поездов. Широкое применение силовых полупроводников на э.п.с.
позволяет несколько сгладить серьезные недостатки независимого возбуждения ТЭД — сильный разброс токов нагрузки между параллельно работающими ТЭД локомотива и чувствительность к колебаниям напряжения в контактной сети.
Сравнительные испытания электровозов ВЛ80р с последовательным возбуждением тяговых электродвигателей и ВЛ80Р с независимым возбуждением с поездами, проведенные ВНИИЖТом [7,8], показали, что коэффициент тяги электровозов ВЛ80рн на 8,4 % выше, чем ВЛ80р; во время разгона, т.е. в диапазоне высоких токовых нагрузок жесткость тяговых характеристик электровозов ВЛ80РН и ВЛ80р сближается и их тяговые возможности почти не отличаются.
ПОИСК
Тепловозы с электрической передачей. При тяговых расчетах обычно пользуются тяговыми характеристиками тепловозов, получаемыми в результате их специальных испытаний. Эти характеристики приведены в приложении к ПТР.
Однако иногда возникает необходимость иметь тяговые характеристики тепловоза еще до его испытания, например, в процессе проектирования для оценки различных вариантов и т. д. Поэтому надо уметь построить предположительную тяговую характеристику данного типа тепловоза, имея некоторые исходные данные.
Такое построение можно осуществить, зная мощность дизеля и к. п. д. электрической передачи при разных скоростях движения или зная характеристику его главного генератора / 1 и электромеханические характеристики тяговых электродвигателей тепловоза.
[c.31]
| Рис. 12. Схема электромеханической характеристики тягового электродвигателя при данном напряжении [/д | 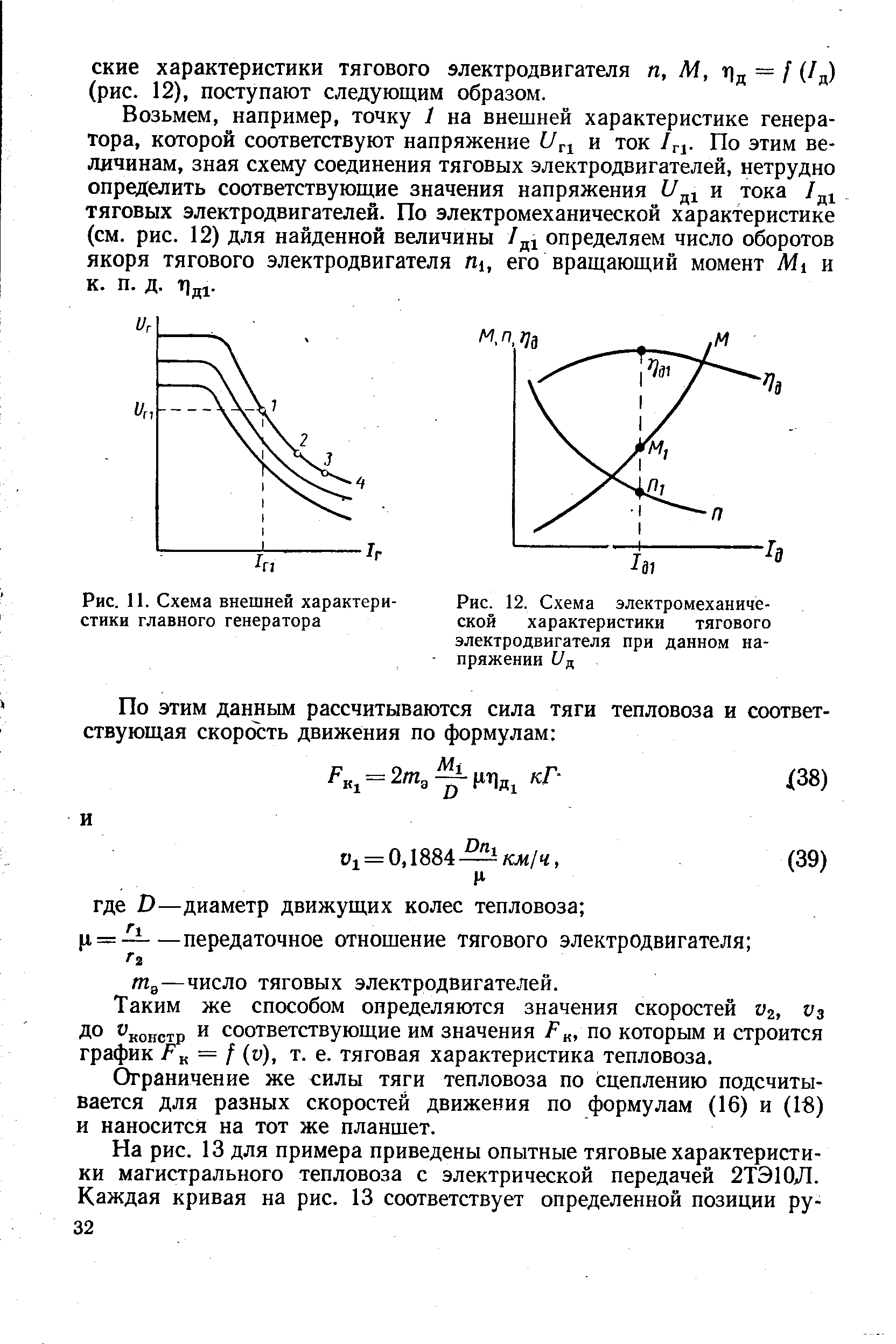 |
ЭЛЕКТРОМЕХАНИЧЕСКИЕ ХАРАКТЕРИСТИКИ ТЯГОВОГО ЭЛЕКТРОДВИГАТЕЛЯ
[c.52]
Совокупность характеристик, представляющих собой зависимости скорости вращения якоря (числа оборотов якоря Мд), вращающего момента на валу якоря М, к. п. д. электродвигателя т]д от тока / , называют электромеханическими характеристиками тягового электродвигателя. Они устанавливают связь между электрическими и механическими режимами работы тягового электродвигателя и относятся к постоянному напряжению
[c.52]
Электромеханические характеристики тягового электродвигателя, отнесенные к ободу движущих колес, часто дополняются магнитной характеристикой СФ = /4 (/д) (рис. 25).
[c.55]
| Рис. 26. Электромеханические характеристики тягового электродвигателя НБ-406 электровоза ВЛ8, приведенные к ободу движущих колес | 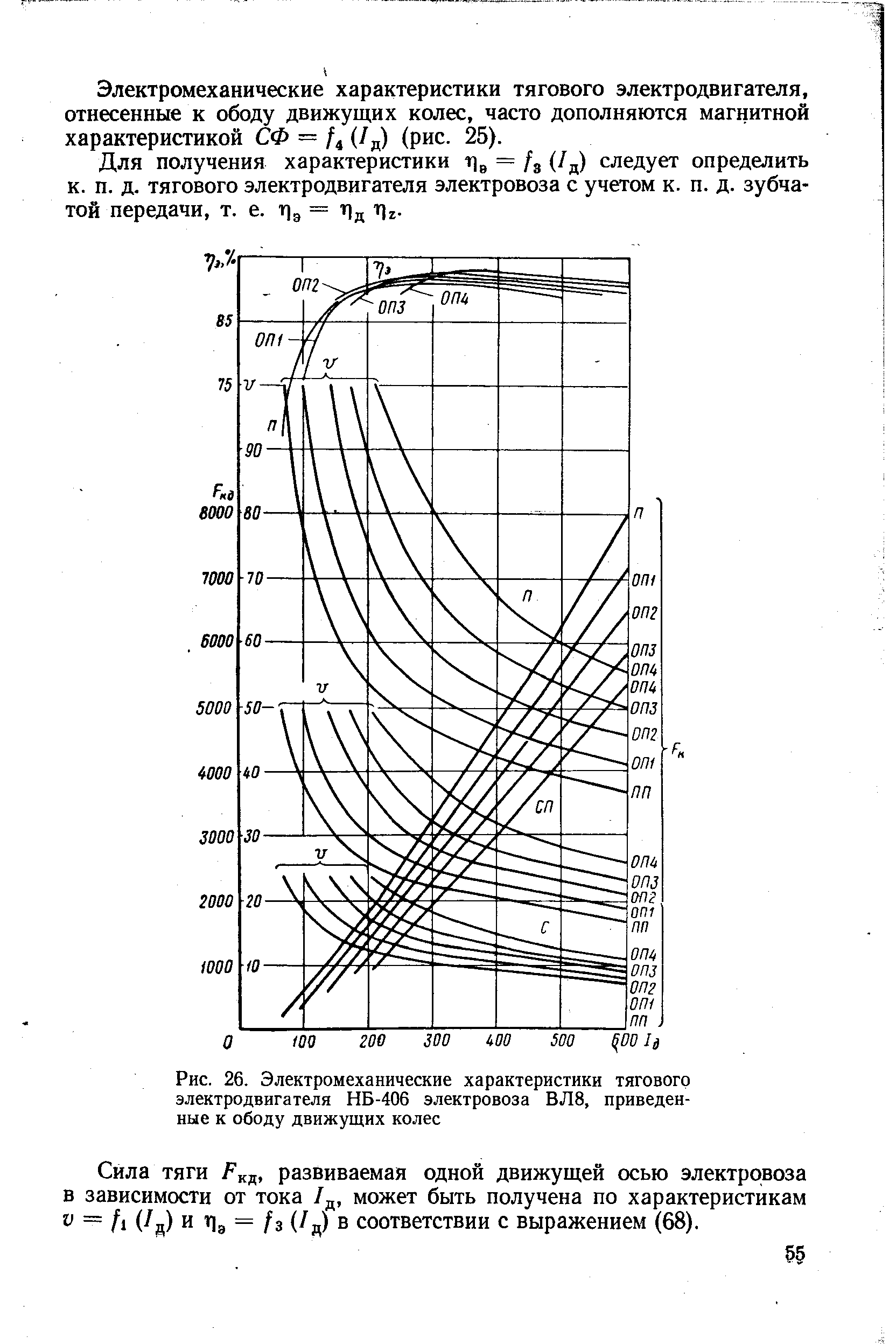 |
На рис. 26, для примера, приведены электромеханические характеристики тягового электродвигателя НБ-406 электровоза ВЛ8.
[c.56] Полученные таким образом значения планшете точки с координатами и v , Так, например, на электромеханической характеристике тягового электродвигателя (рис. 27,а) величинам тока /д,. «/д2 и /дз соответствуют скорости Их, и 3 и силы тяги Р д2, /цдз. Координаты точек искомой кривой = = /(и) (рис. 27,6) будут [c.56] Электромеханические характеристики тягового электродвигателя при изменении напряжения можно получить из соответствующих характеристик при нормальном напряжении 1 500 в.
[c.59]
К дополнительным характеристикам относят электромеханические характеристики тяговых электродвигателей, характеристики трансформаторов, выпрямительных установок, вентиляторов, двухмашинных агрегатов и прочего вспомогательного оборудования.
[c.204]
Магнитный поток электродвигателя последовательного возбуждения можно изменять шунтированием обмотки возбуждения сопротивлением, варьированием числа витков обмотки возбуждения и последовательно-параллельным включением отдельных частей обмотки возбуждения. Первый способ (рис.
7, г) не требует усложнения конструкции электродвигателя и поэтому получил наибольшее распространение. Для выравнивания распределения тока между шунтом и обмоткой возбуждения при неустановившихся режимах (случайных отсоединениях токоприемника от контактного провода и др.
) на электровозах в цепь сопротивления Яш включен индуктивный шунт Lш. Обычно применяют две и более ступеней шунтирования. На рис. 7 приведены электромеханические характеристики тягового электродвигателя НБ-406, имеющего четыре ступени шунтирования обмотки возбуждения.
[c.
14]
Известно, что у электрических машин одного назначения с одинаковой системой возбуждения и одинаковым использованием электрических и магнитных материалов имеется подобие, выражающееся в близком совпадении их безразмерных характеристик. Поэтому в предварительных расчетах электромеханические характеристики тяговых электродвигателей могут быть построены по универсальным характеристикам.
[c.332]
Характеристику силы тяги тепловоза и газотурбовоза с электрической передачей постоянного тока строят по электромеханическим характеристикам тяговых электродвигателей. [c.365]
Для остальных серий электровозов и моторных вагонов силы тяги определять по тяговым характеристикам, построенным для новых бандажей в соответствии с электромеханическими характеристиками тяговых электродвигателей, снятыми при испытании этих двигателей на стенде, или по расчетным характеристикам, гарантируемым заводом-изготовителем. Характеристики электро-подвижного состава постоянного тока должны быть построены для напряжения на токоприемнике при тяговом режиме 3000 В, а при рекуперативном — 3300 В.
[c.30]
Различают электромеханические характеристики, отнесенные к валу тягового электродвигателя и к ободу движущих колес.
[c.52]
Для построения каждой кривой /»к = /(и) как для полного поля (ПП), так и для любой ступени ослабления поля (ОП) при соответствующих схемах соединения тяговых электродвигателей задаются различными значениями тока и по электромеханическим характеристикам /»рд /2 (/д) и и = /1 (/д) находят соответствующие этим токам значения силы тяги / д и скорости движения V. При числе тяговых электродвигателей полная сила тяги электровоза будет равна
[c.56]
При стендовых испытаниях производят испытания лишь основных агрегатов и узлов локомотива (тяговых электродвигателей, дизеля, главного генератора и т. п.). Так, при стендовых испытаниях тяговых электродвигателей определяют их электромеханические, а также тепловые характеристики. Эти испытания производят на заводских стендах по методу взаимной работы.
[c.205]
Как уже известно, передача на тепловозе обеспечивает требуемый вид тяговой характеристики при неизменном режиме работы дизеля. Задачей системы регулирования энергетической цепи является такая трансформация характеристик элементов передачи, при которой выполняется это условие.
Тяговый электродвигатель как звено, непосредственно связанное с движущими осями, имеет электромеханические характеристики М = / (/) и п =ф (/), момент вращения на валу и частоту вращения вала в зависимости от тока его нагрузки, которые воспроизводит тяговая характеристика.
Характеристики должны иметь вид, удовлетворяющий изложенному выше условию. Приведение этих характеристик к требуемому виду и является задачей автоматического регулирования. В качестве сигналов должны быть использованы координаты выхода энергетической цепи, т. е.
физические величины, изменяющиеся с изменением ее нагрузки.
[c.8]
Основные (электромеханические) характеристики электродвигателя (рис. 3.20) построены для различных напряжений (соответствующих внешней характеристике тягового генератора) на зажимах электродвигателя при работе тепловоза на 15-й позиции контроллера машиниста. По горизонтали отложен ток 1, а по вертикали — в соответствующих масштабах скорость к. п. д. и сила тяги Все зависимости построены для трех режи.мов работы — полного возбуждения электродвигателя (а=100 %) и двух ступеней (а =60% и аа = 36 %) ослабления возбуждения.
[c.72]
Следовательно, тяговые характеристики тепловоза могут быть получены перемножением на шесть значений силы тяги одного электродвигателя по электромеханическим характеристикам при различных скоростях движения (см. рис. 3, 4).
[c.108]
Тяговой генератор Г постоянного тока с независимым возбуждением питает шесть параллельно соединенных тяговых электродвигателей 1—6 последовательного возбуждения.
Электромеханические характеристики электродвигателей последовательного возбуждения в рабочем диапазоне скоростей имеют вид гиперболы, что позволяет осуществить автоматическое регулирование возбуждения тягового генератора при помощи сравнительно несложных и надежных в эксплуатации электрических аппаратов. Тяговые электродвигатели включаются поездными контакторами П1—П6.
[c.112]
Этим соотношением определяется запас прочности вращающихся частей тягового двигателя. Чем выше это отношение, тем выше запас прочности двигателя.
Однако основные номинальные данные не дают исчерпывающего представления о работоспособности тягового двигателя.
Поэтому качество работы тяговых электродвигателей при изменении режимов их работы оценивается по электромеханическим и электротяговым характеристикам, отнесенным к ободу колеса тележки.
[c.75]
На всех Советских электровозах (так же, как и на тепловозах) установлены тяговые электродвигатели последовательного типа, у которых обмотки возбуждения (полюсов) соединены последовательно с обмоткой якоря (рис. 23).
Тяговые характеристики электровозов составляют на основе их испй-таний. Однако возможно их построение с помощью электромеханических характеристик тяговых электродвигателей, получаемых при стендовых испытаниях последних.
[c.
49]
НОГО поля. Эти характеристики обычно получают опытным путем, но они могут быть построены и по электромеханическим характеристикам тяговых электродвигателей, приведенным к ободу движущих колес.
[c.56]
Кроме того, скорость может регулироваться путем ослабления поля двигателей. Электромеханические характеристики тягового] электродвигателя электровозов переменного тока, приведенные к ободу колес, подобны аналогичным характеристикам электровозов шх тоян-64
[c.64]
| Рис. 7. Электромеханические характеристики тягового электродвигателя НБ-406А, приведенные к ободу колеса электровоза ВЛ8 |  |
Построение электромеханических характеристик тягового электродвигателя электровоза переменного тока аналогично построению этих характеристик для двигателя электровоза постоянного тока. Различие состоит лишь в том, что величина выпрямленного напряжения уменьшается с увеличением тока вьшрямител.ч. Поэтому зависимость и 1) для каждой ступени регулирования необходимо строить с учетом наклона внешних характери- 1к стик выпрямителя.
[c.371]
| Рис. 43. Электромеханические характеристик тягового электродвигателя типа ЭД-118А | 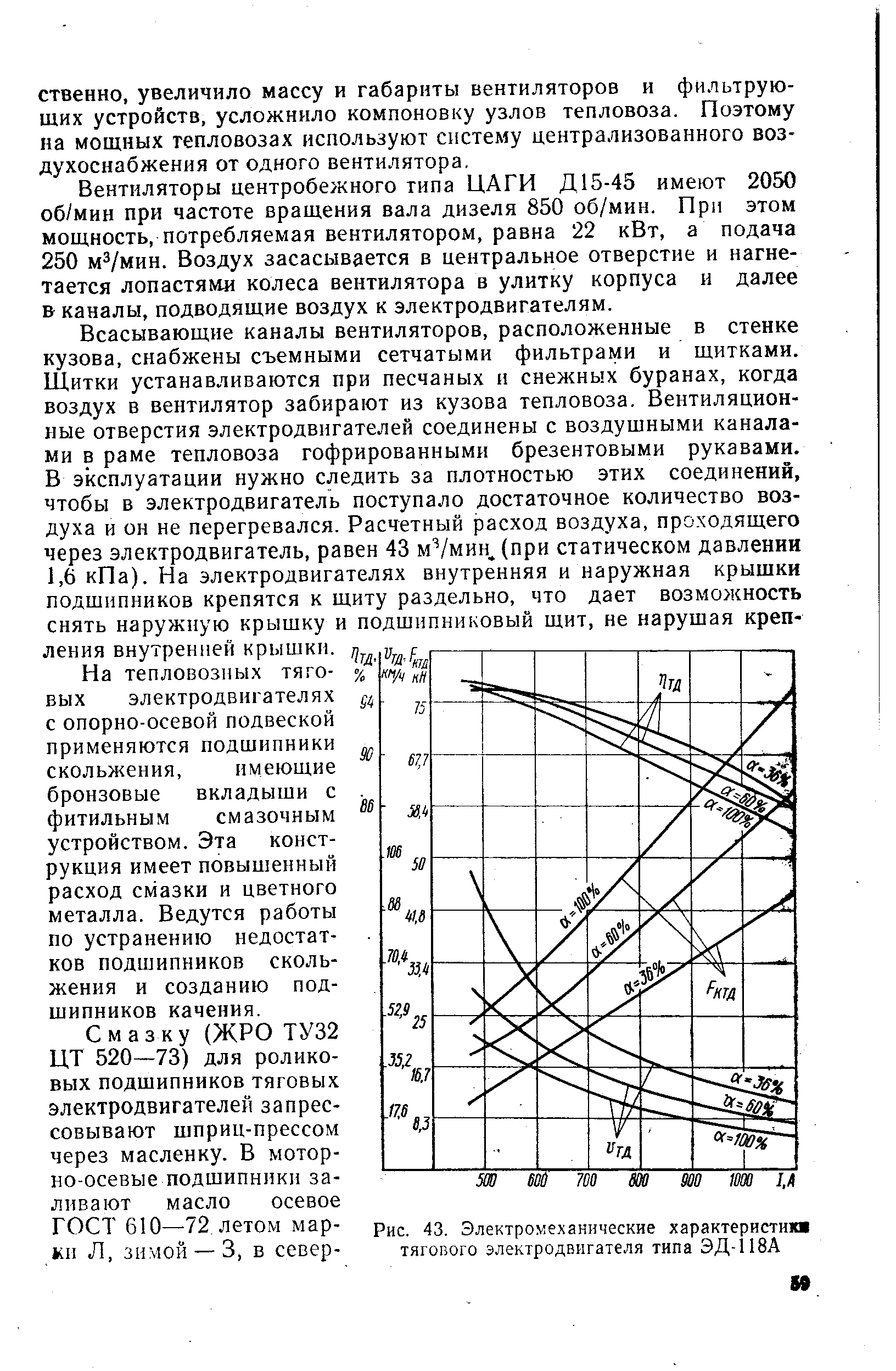 |
Расчетные электромеханические характеристики тяговых электродвигателей тепловозов ТЭМ1 и ТЭМ2 при питании от генератора с гиперболической внешней характеристикой при полном и ослабленном поле электродвигателей показаны соответственно на рис. 106 и 107.
[c.108]
Тяговая характеристика тепловоза 2ТЭ116 (рис. 2) построена по электромеханическим характеристикам тягового электродвигателя ЭД-118А для стандартных атмосферных условий.
[c.9]
Возьмем, например, точку 1 на внешней характеристике генератора, которой соответствуют напряжение 11 1 и ток 1 .
По этим величинам, зная схему соединения тяговых электродвигателей, нетрудно определить соответствующие значения напряжения /д1 и тока /д тяговых электродвигателей. По электромеханической характеристике (см. рис.
12) для найденной величины /д определяем число оборотов якоря тягового электродвигателя щ, его вращающий момент М1 и к. п. д. Т1д1.
[c.32]
Напряжение на тяговых электродвигателях /д падает с увеличением тока /д вследствие повышения падения напряжения в трансформаторе и сглаживающем дросселе. Скорость вращения якоря тягового электродвигателя при одном и том же напряжении у электровоза переменного тока выше, чем у электровоза постоянного тока, так как у тяговых электродвигателей при нормальной работе, соответствующей полному полю, уже имеется постоянное ослабление поля на 10%. Такое предварительное ослабление поля делается для уменьшения пульсации магнитного потока. Тяговые характеристики электровоза переменного тока рассчитываются и перестраиваются из электромеханических характеристик V = (/д) и = /г (/д) так же, как и для электровозов постоянного тока. Построенные таким образом тяговые характеристики проверяются при тягово-энергетических испытаниях электровозов. Для примера приводятся тяговые характеристики электровоза переменного тока ВЛ60 (рис. 35).
[c.65]
Электромеханические характеристики, а также зависимость СФ (/д) тяговых электродвигателей параллельного возбуждения приведены на рис. 171.
Первый квадрант относится к работе двигателя в режиме тяги, а второй и третий — в режиме генератора при рекуперативном торможении с отдачей энергии в сеть.
В связи с тем что ток возбуждения у этих двигателей не зависит от тока якоря, магнитный поток Ф и величина СФ с увеличением тока якоря почти не меняются (линия /). Незначительное снижение объясняется размагничивающим дейстЕпем реакции якоря.
[c.262]
Пуск электродвигателя с короткозамкнутым ротором связан с большими потерями мощности и нагреванием обмоток. Успехи силовой полупроводниковой техники и средств автоматики дают возможность создать надежные и экономичные статические преобразователи частоты с приемлемыми для тепловозов размерами и массой.
Этим обусловливается практическое использование в тепловозной тяге передачи переменного тока с асинхронными короткозамкнутыми электродвигателями, тем более, что для тепловозов с дизелями мощностью более 2940 кВт в секции при использовании тяговых электродвигателей постоянного тока придется существенно усложнять их конструкцию (применять сборные или сварные остовы, компенсационные обмотки и т. п.
или увеличивать число осей). Харьковский завод Электротяжмаш им, Ленина, Ворошиловградский тепловозостроительный завод им. Октябрьской революции и Таллинский электромеханический завод им. Калинина создали опытный тепловоз ТЭ120 мощностью 2940 кВт с передачей переменного тока, на котором применены асинхронные короткозамкнутые тяговые электродвигатели ЭД-900 (рис, 49).
Тяговые электродвигатели ЭД-900 с опорноосевой подвеской имеют следующие основные характеристики [c.45]
В подвесных дорогах большой протяженности, с питанием электроэнергией от контактной сети перспективным видом привода является привод с тяговыми асинхронными электродвигателями трехфазного переменного тока с короткозамкнутым ротором в сочетании с новой системой электронного управления, допускающей плавное и глубокое регулирование работы тяговых двигателей.
В этом случае контактное питание электроэнергией может осуществляться от одного контактного привода (шины) однофазного переменного тока или постоянного тока с использованием в качестве отводящего провода рельса дороги. Замена трех питающих контактных проводов одним упрощает устройство контактной сети, стрелок и других элементов верхнего строения дороги.
Электрическая схема подвесного тягача показана на рис. 6.21. При питании от контактной сети постоянного тока схема упрощается, так как не требуется преобразования однофазного переменного тока в постоянный.
При глубине регулирования частоты итающего тяговые электродвигатели тока от 0,1 до 60 Гц их электромеханическая скоростная характеристика имеет вид, изображенный на рис. 6.21, б, что позволяет электротягачу работать на многих экономичных ступенях регулирования скорости его движения.
Как показал опыт эксплуатации подобных наземных элек-тровозоп на промышленном транспорте, новый привод с применением силовой электроники дал возможность сократить массу тягачей (локомотивов), уменьшить расходы на ремонт электродвига-
[c.136]
Тяговые характеристики электровоза
Тяговые характеристики представляют из себя зависимость силы тяги электровоза от скорости:
Эти характеристики строятся графическим путем из электромеханической характеристики, отражающей зависимость силы тяги колеса от тока для каждого соединения тяговых электродвигателей, как для полного возбуждения, так и для всех ступеней ослабления возбуждения.
Поэтому электровоз ВЛ10 имеет 15 автоматических характеристик, позволяющих определить силу тяги электровоза при любой скорости и на любом соединении.
Например: — При V = 10 км/час, Fk более 56 000 кгс, кривая зависимости выходит за пределы ограничения по сцеплению (под цифрой 1) и электровоз должен боксовать.
— При V = 20 км/час, ПВ на С соединении, Fk = 8 000 кгс, а при этой же скорости при ПВ+ОВ4 Fk = 16000 кгс.
— При V = 50 км/час ПВ + ОВ4 СП соединении Fk около 16 000 кгс, а при этой же скорости на П соединении при ПВ Fk около 32 000 кгс. и т.д.
 Тяговые характеристики электровозов ВЛ10 и ВЛ10У
Тяговые характеристики электровозов ВЛ10 и ВЛ10У
На тяговые характеристики нанесены ограничения в работе электровоза:

2. — ограничение по току 600 А. Определяет максимальную температуру нагрева обмоток тягового электродвигателя и коллектора. За пределами этого ограничения температура нагрева превышает допустимую температуру, поэтому следование с большими токами должно быть ограничено по времени.
3. — ограничение по ослаблению возбуждения ОВЗ на П соединении. Ограничение обуславливается коммутацией тяговых электродвигателей. За пределами этого ограничения возрастает реакция якоря и ухудшается коммутация.
4. ограничение по конструктивной скорости 100 км/час. При ходовой части, рассчитанной на эту скорость, конструктивная скорость определяется креплением катушек обмотки якоря в пазах сердечника и прочностью коллектора. Исключение составляет электровоз ВЛ8, у которого конструктивная скорость снижена до 80 км/час из-за конструкции ходовой части.
Пуск электровоза.
При трогании электровоза с места противо-э.д.с. тяговых электродвигателей равна нулю, поэтому при подключении к контактной сети восьми тяговых электродвигателей ток, протекающий по ним будет равен: I = Uкс : ( 8* Rтэд) = 3000 В: ( 8 * 00923 Ом)=4180 А
Очевидно, что величину этого тока необходимо ограничить. С этой целью в цепь тяговых электродвигателей вводят пусковой резистор.
Величина сопротивления этого резистора подбирается из расчета плавного трогания с места одиночного электровоза.
Примером может служит электровоз серии ВЛ22М, у которого величина сопротивления этого резистора равна 30 Ом и ток первой позиции равен 100А, обеспечивающий плавность трогания электровоза с места.
Совсем иначе обеспечивается плавность трогания с места электровоза ВЛ10. Для её обеспечения применили постепенное увеличение магнитного потока главных полюсов тяговых электродвигателей. Это выполнили следующим образом.
На первой позиции контроллера машиниста тяговые электродвигатели работают с глубоким ослаблением возбуждения равным — 55%. На второй позиции тяговые электродвигатели переключаются на полное возбуждение, а с третьей позиции уменьшается величина сопротивления пускового резистора, т.е.
начинается реостатный пуск электровоза. Таким образом, при малой величине сопротивления пускового резистора, плавность пуска электровоза ВЛ10 обеспечена постепенным увеличением магнитного потока главных полюсов его электродвигателей.
Почему же её не обеспечили путем включения в их цепь пускового резистора, с величиной сопротивления обеспечивающего плавность пуска одиночного электровоза? Дело все в том, что при малой величине сопротивления пускового резистора и при том же количестве ящиков типа КФП этого резистора (12), появилась возможность элементы, из которых собраны ящик, соединить в большее количество параллельных ветвей, чем и уменьшить ток, проходящий по ним, а значит уменьшить нагрев элементов.
Вывод: уменьшенная величина сопротивления пускового резистора обеспечила уменьшение нагрева его элементов, а увеличение магнитного потока главных полюсов с глубокого возбуждения до полного возбуждения, обеспечила плавность пуска одиночного электровоза при этой уменьшенной величине сопротивления пускового резистора.
Пусковая диаграмма.
Пусковая диаграмма, это семейство скоростных характеристик, выполненных на различные напряжения, т.е. для каждой реостатной и ходовых позиций контроллера машиниста. Она отражает пуск электровоза.
 Пусковая диаграмма электровоза ВЛ11
Пусковая диаграмма электровоза ВЛ11
Позиции с первой по восьмую являются маневровыми.
На позициях 1-4 отражен пуск электровоза ВЛ11 по № 489 путем постепенного увеличения магнитного потока главных полюсов тяговых электродвигателей с 16 % ослабления возбуждения до полного возбуждения на четвертой позиции.
С пятой позиции -начало реостатного пуска.
Величина сопротивления секций пускового резистора выводимых из цепи тяговых электродвигателей на этих позициях подобрана так, чтобы скорость увеличивалась незначительно, сохраняя плавность пуска одиночного электровоза, полученную на первых позициях.
С девятой позиции отражен вывод из цепи тяговых электродвигателей секций пускового резистора с большей величиной сопротивления.
Для того чтобы скорость возрастала, а сила тяги не снижалась, тяговые электродвигатели переводятся с одной на другую скоростную характеристику (позицию). Пусковой ток при этом поддерживается в пределах 520-570 А , т.е.
средний пусковой ток имеет величину 520 А, которая обеспечивает увеличение силы тяги до величины не превышающую силу сцепления.
Горизонтальные участки диаграммы отражают увеличение силы тока при переходе с одной позиции на другую, происходящей из-за уменьшения величины сопротивления пускового резистора.
Наклонные участки диаграммы отражают увеличение скорости при переходе на высшие позиции (при увеличении силы тока увеличилась сила тяги) и одновременно уменьшение силы тока (при увеличении скорости увеличилась противо-э.д.с.)
При переходе с 21 позиции СП соединения на 22 позицию П соединения тяговых электродвигателей отражено уменьшение силы тока, происходящее из-за ввода в цепь тяговых электродвигателей части пускового резистора, который был полностью выведен на 21 позиции.
Позиции 21 и 37 называются автоматическими скоростными характеристиками, так как на этих позициях сила тока и сила тяги регулируются автоматически противо-э.д.с. Например, чем круче подъём, тем меньше частота вращения якорей тяговых электродвигателей, меньше противо-э.д.с., а значит больше сила тока, что вытекает из закона Ома, и сила электровоза тяги и наоборот.
- Регулирование скорости.
- Для того, чтобы разогнать электровоз до требуемой скорости необходимо увеличить напряжение на тяговых двигателей или применить какие-то другие способы регулировки скорости. Эти способы вытекают из следующей формулы:
- V =

- где:
- Uk — напряжение на коллекторах электродвигателей,
С — постоянный коэффицент э.д.с.,
- Rп — величина сопротивления пускового резистора,
- Ф — магнитный поток электродвигателей.
- R тэд — величина сопротивления обмоток тягового электродвигателя.
1 Способ: постепенным уменьшением величины сопротивления пускового резистора, вводимого в цепь тяговых электродвигателей для ограничения их пускового тока.
Уменьшение величины сопротивления пускового резистора осуществляется перемещением главной рукоятки контроллера машиниста с первой позиции, по реостатным позициям, до ходовой позиции.
На каждой из реостатных позиций величина сопротивления пускового резистора уменьшается путем закорачивания его секций или соединением их в параллельные ветви при помощи реостатных контакторов.
Уменьшение сопротивления пускового резистора сопровождается одновременно плавным увеличением напряжения на тяговых электродвигателях до напряжения ходовых позиций, выбранных для пуска (С или СП соединение тяговых позиций на электровозе ВЛ10), на которых пусковой резистор полностью выведен (его сопротивлению равно нулю).
2 Способ: увеличением напряжения на коллекторах тяговых электродвигателей. Повышение напряжения на тяговых электродвигателях выполняется путем изменения соединения тяговых электродвигателей: С, СП или П соединение. При изменении соединения, во избежание броска тока, в цепь тяговых двигателей вновь вводиться пусковой резистор.
Величина сопротивления резистора вновь постепенно уменьшается на реостатных позициях, и резистор полностью выводится на ходовых позициях этих соединений.
Напряжение на тяговых электродвигателях на ходовых позициях контроллера машиниста для электровоза ВЛ10 на С соединении равно 3000 В : 8 = 375 В, на СП соединении — 3000В : 4 =750 В и на П соединении — 3000В: 2 = 1500 В.
3 Способ: ослабление возбуждения тяговых электродвигателей. Ослабление возбуждения тяговых электродвигателей выполняется путем перевода тормозной рукоятки контроллера машиниста на позиции ОП1, ОП2, ОПЗ или ОП4.
При этом параллельно двум обмоткам возбуждения тяговых двигателей подключается резистор ослабления возбуждения Roп, имеющий четыре секции: 1-2, 2-3, 3-4, 4-6.
Ток, пройдя по обмоткам якорей, протекает по обмоткам возбуждения и параллельно через соответствующую секцию резистора Roп, подключенную контакторами К1 на ОП1, К1 и К2 на ОП2, К1 и КЗ на ОПЗ и К1 и К4 на ОП4.
Степень ослабления возбуждения на позиции ОП1 =75%, на ОП2 = 55%, на ОПЗ = 43% и на ОП4 = 36%, т.е. на каждой из позиций ОП по обмоткам возбуждения протекает ток, равный части тока якоря в процентном отношении указанном выше.
Сравнение характеристик тяговых электродвигателей
- Для того чтобы выполнить сравнение характеристик тяговых двигателей необходимо определиться с перечнем требований предъявляемых к ним.
- Требования, предъявляемые к характеристикам тяговых электродвигателей.Характеристики электродвигателей используемых для тяги поездов должны удовлетворять следующим условиям:
- · электрическая устойчивость режимов работы;
- · механическая устойчивость движения поезда;
- · равномерное распределение нагрузок между параллельно работающими тяговыми двигателями;
- · возможно меньшие изменения нагрузки двигателей при колебаниях напряжения в контактной сети;
- · наименьшие изменения потребляемой мощности при движении поезда по различным элементам профиля;
- · экономичное регулирование скорости в широком диапазоне;
- · наименьший расход энергии на тягу поездов;
- · использование рекуперативного торможения;
- · максимальное использование сцепления колесных пар с рельсами;
- · надежность в работе.
Под электрической устойчивостью понимается восстановление электродвигателями значения установившегося тока при незначительных случайных его отклонениях. Данное требование является наиболее важным, так как при наличии электрической неустойчивости двигатель не может быть использован на практике.
Электрическую устойчивость устанавливают при рассмотрении уравнения (3), преобразованное к виду (16) с учетом закономерностей определяющих изменение магнитного потока, так как частоту вращения при быстро протекающих электрических процессах можно считать практически неизменной.

Из всех перечисленных вариантов возбуждения тяговых двигателей к электрическй неустойчивости может привести встречно-смешанное возбуждение двигателей.
Механической устойчивостьюназывают стремление тягового электродвигателя к восстановлению установившейся скорости движения при возникновении ее отклонений.
Как известно из механики установившееся движение возникает при равенстве силы тяги силам сопротивления движению.
Для определения механической устойчивости тяговых двигателей с различными системами возбуждения нанесем на рисунок 6 кривую сил сопротивления движению (рисунок 7), которые несколько возрастают с ростом скорости.
Установившееся движение поезда возникает в точках пересечения кривых сил тяги (1 – 3) с кривой сопротивления движению (4).

Рисунок 7. К определению механической устойчивости тяговых электродвигателей при различных системах возбуждения.
1 – тяговая характеристика э.п.с. с двигателем параллельного или независимого возбуждения; 2 – тяговая характеристика э.п.с. с двигателем согласно-смешанного возбуждения; 3 – тяговая характеристика э.п.с. с двигателем последовательного возбуждения; 4 – кривая сил сопротивления движению (W).
Как видно из рисунка 7 для всех трех рассмотренных случаев, при случайном увеличении скорости движения сила сопротивления движению станет больше силы тяги.
Следовательно, поезд начнет замедляться вплоть до достижения установившейся скорости движения.
При случайном уменьшении скорости силы тяги наоборот становятся больше силы сопротивления движению, следовательно, поезд будет разгоняться до достижения установившейся скорости движения.
Равномерное распределение нагрузки между тяговыми электродвигателями. Как правило, локомотивы имеют несколько тяговых электродвигателей включаемых в параллельные ветви.
При изготовлении неизбежны отклонения размеров деталей, качества обработки поверхностей, магнитных свойств используемых сталей в пределах установленных допусков. Поэтому электромеханические характеристики двигателей несколько отличаются друг от друга.
Свою роль играет также роль разница в диаметрах колесных пар локомотива. Все эти отклонения являются причиной неравномерного распределения нагрузок по колесным парам локомотива.
При рассмотрении электромеханических характеристик можно доказать, что мягкие характеристики двигателей последовательного возбуждения обеспечивают более равномерное распределение нагрузок, по сравнению с двигателями согласно-смешанного и параллельного возбуждения.
Изменение нагрузок тяговых электродвигателей при изменении напряжения в контактной сети. Как видно из формулы (4), частота вращения зависит от напряжения на электродвигателе, которое определяется напряжением в контактной сети. Следовательно, при изменении напряжения в контактной сети изменится и зависимость n=f(I) электромеханической характеристики.
На рисунке 8 показано влияние изменения напряжения в контактной сети на ток и вращающий момент для двигателя с последовательной и параллельной системой возбуждения.
При скачкообразном изменении напряжения частота вращения двигателя в силу инерционных свойств практически не изменяется, следовательно, переход от одной зависимости n=f(I) на другую происходит по горизонтальной линии. Как видно из рисунка изменение тока тягового двигателя и вращающего момента в двигателях последовательного возбуждения достаточно невелико, а в двигателях параллельного возбуждения значительно больше.

Рисунок 8. Влияние изменения напряжения на ток нагрузки и вращающий момент тягового двигателя: а) – двигатель последовательного возбуждения; б) – двигатель параллельного возбуждения.
Таким образом, колебания напряжения вызывают незначительные изменения нагрузок у двигателей последовательного возбуждения. При параллельном возбуждении толчки тока и силы тяги получаются значительно больше и могут отразиться на плавности движения поезда.
Изменения мощности, потребляемой тяговыми электродвигателями при движении по различным элементам профиля. В зависимости от условий движения тяговые электродвигатели э.п.с. развивают различные мощности. При следовании по легким участкам профиля они работают с небольшими нагрузками и потребляемыми мощностями.
В случае движения состава на тяжелых подъемах электродвигатели работают с большими токами нагрузки и мощностями.
При сохранении режима ведения поезда у тяговых двигателей независимого и параллельного возбуждения из-за жестких характеристик скорость уменьшается незначительно, а, следовательно, потребляемая мощность возрастает практически пропорционально увеличению силы тяги (вращающего момента).
Тяговые электродвигатели последовательного возбуждения благодаря мягким характеристикам при повышении силы тяги снижают скорость движения, следовательно, потребляемая ими мощность и ток оказываются меньше чем у двигателей с жесткими характеристиками, что способствует более равномерной загрузке тяговых подстанций.
Использование пропускной способности линий. Тяговые электродвигатели последовательного возбуждения обеспечивают движение по тяжелым подъемам с меньшими скоростями, чем на более легких участках пути.
Участки с тяжелыми подъемами ограничивают число пропускаемых пар поездов.
В случае применения тяговых двигателей параллельного возбуждения с жесткими характеристиками скорость движения поездов по всем элементам профиля будет примерно одинаковой и на тяжелых подъемах будет больше чем у двигателей последовательного возбуждения.
По условиям использования пропускной способности двигатели с жесткими характеристиками имеют некоторое преимущество.
Экономичное регулирование скорости движения. Скорость движения поезда при установке на э.п.с. двигателей параллельного и смешанного возбуждения можно легко регулировать изменением магнитного потока за счет воздействия на небольшой по своему значению ток возбуждения.
В электродвигателях последовательного возбуждения регулирование магнитного потока требует усложнения силовой цепи и дополнительного оборудования из-за больших токов, протекающих через обмотку возбуждения.
Однако в этом случае требуется меньшее число ступеней регулирования благодаря мягким характеристикам и меньшим диапазонам регулирования скорости.
Расход энергии на тягу поездов. При постоянной скорости движения требуется совершать меньшую работу по перемещению поезда. Поэтому при использовании жестких характеристик двигателей параллельного возбуждения расходуется меньше электроэнергии.
При мягких характеристиках электродвигателей последовательного возбуждения скорость движения изменяется в широких пределах в зависимости от профиля пути. При равной средней скорости здесь требуется совершить большую работу и израсходовать несколько больше энергии.
Это связано с тем, что силы сопротивления движению возрастают с увеличением скорости более интенсивно, чем сама скорость движения.
Частично такой перерасход энергии компенсируется снижением потерь в пусковом реостате за счет более низких скоростей выхода на безреостатные характеристики.
Использование рекуперативного торможения.
Рекуперативное торможение позволяет уменьшить расход электрической энергии благодаря ее возврату в сеть при движении поезда на спуске или при снижении скорости движения.
Тяговые электродвигатели параллельного и согласно-смешанного возбуждения переходят в режим рекуперации (в генераторный режим работы) автоматически при увеличении скорости движения.
Тяговые двигатели последовательного возбуждения в режиме рекуперации устойчиво работать не могут. Поэтому на э.п.с. их переводят на независимое возбуждение от специального преобразователя, что приводит некоторому усложнению оборудования и электрических схем.
Условия сцепления колес с рельсами.
В случае использования двигателей параллельного или независимого возбуждения благодаря жестким характеристикам сцепление колесных пар с рельсами восстанавливается быстрее, среднее значение силы тяги по сцеплению, а следовательно, и коэффициент сцепления получается больше, чем у двигателей последовательного возбуждения с мягкими характеристиками.
Из анализа предъявляемых к тяговым двигателям требований видно, что каждая система возбуждения имеет свои преимущества и недостатки.
Однако, по таким наиболее важным показателям, как равномерность распределения нагрузок, меньшее изменение нагрузки при колебаниях напряжения в контактной сети, меньшее изменение мощности при движении по различным элементам профиля пути, электродвигатели последовательного возбуждения обладают преимуществами. Поэтому данный тип двигателей используют в качестве тягового на э.п.с.
С таким недостатком как более низкий коэффициент сцепления борются при помощи различных систем противобоксовочной защиты. Для обеспечения рекуперации переводят электродвигатели на независимое возбуждение, хотя это и усложняет электрооборудование э.п.с.





